修改姿态
姿态图提供了几种用于修改姿态的结点。这些结点都接受一个输入姿态,并输出修改后的姿态。
| 输入 | 类型 | 含义 |
|---|---|---|
姿态 | 姿态 | 要修改的姿态。 |
姿态节点的操作请参考 姿态图节点视图。
应用变换
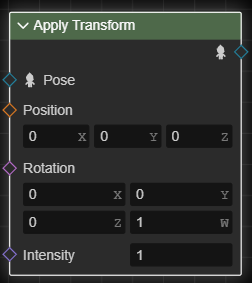
应用变换结点 应用变换(位移和旋转)到输入姿态的指定结点。
| 输入 | 类型 | 含义 |
|---|---|---|
位置 | 三维向量 | 对位置的修改量。 |
旋转 | 四元数 | 对旋转的修改量。 |
强度值 | 浮点数 | 修改的应用强度,在 [0, 1] 范围内。0 表示完全不应用修改,1 表示完全应用修改。 |
| 对象属性 | 含义 |
|---|---|
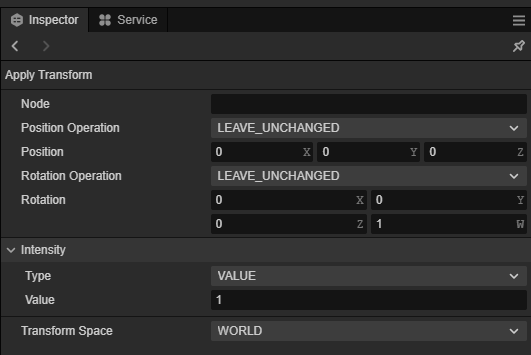
结点 | 要修改的结点的名称。 |
位置操作 | 指定如何修改位置。见 变换操作选项 |
旋转操作 | 指定如何修改旋转。见 变换操作选项 |
空间 | 修改发生的空间;也即指定的 位置 输入 和 旋转输入所处的空间。 |
变换操作选项
变换操作选项指定了应用变换结点如何修改位置或旋转。选项如下:
| 选项 | 含义 |
|---|---|
| LEAVE_UNCHANGED | 不修改。 |
| REPLACE | 作为位置的应用选项时,将 位置 输入直接用作结点的新位置;作为旋转的应用选项时,将 旋转 输入直接用作结点的新旋转。 |
| ADD | 作为位置的应用选项时,将 位置 输入加到结点目前的位置上;作为旋转的应用选项时,将 旋转 输入加到结点目前的旋转上。 |
拷贝变换
拷贝变换结点 拷贝输入姿态中一个结点的变换至另一结点上。
| 对象属性 | 含义 |
|---|---|
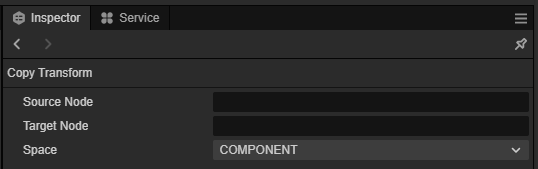
源结点 | 要拷贝的结点的名称。 |
目标结点 | 拷贝到的结点的名称。 |
空间 | 指定拷贝发生的空间。当为 COMPONENT 时表示在组件空间中进行拷贝;当为 LOCAL 时表示在本地空间中进行拷贝。 |
设置辅助曲线
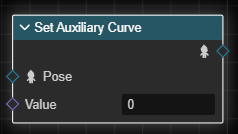
设置辅助曲线结点 修改输入姿势中指定辅助曲线的当前值。
| 输入 | 类型 | 含义 |
|---|---|---|
曲线值 | 浮点值 | 对辅助曲线的修改量。 |
| 对象属性 | 含义 |
|---|---|
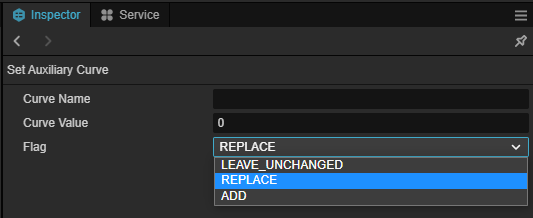
曲线名 | 要修改的辅助曲线的名称。 |
标志 | 指定如何修改辅助曲线。当为 LEAVE_UNCHANGED 时不修改;当为 REPLACE 时表示将 曲线值 输入作为辅助曲线的当前值;当为 ADD 时表示将 曲线值 输入加到辅助曲线的当前值上。 |
双骨骼 IK
IK 解算往往用于移动或旋转骨骼到目标位置,并且带动父级骨骼,使之保持与父级骨骼之间的距离不变(或在可接受的范围内)。例如,在移动脚时,膝盖骨骼和大腿骨骼应该相应弯曲。
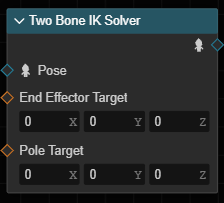
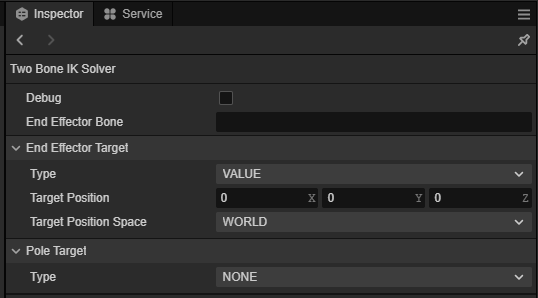
双骨骼 IK 解算器结点 为输入姿势解算两段(三根)骨骼构成的 IK 问题。这三根骨骼构成直接父子关系,即 “子级 - 父级 - 父级的父级”。其中,“子级” 称为 末端执行器 或 末端骨骼,“父级的父级” 称为 (在此 IK 问题中的)根骨骼,“父级” 称为 中间骨骼。
因此,“双骨骼 IK” 中的 “双” 应该理解为 “两段” 而非 “两根”。
求值时,解算器将变换末端骨骼和中间骨骼,并旋转根骨骼,以使末端骨骼到达指定位置;并且在此过程中,保持父子级之间的距离不变、保持根骨骼的位置不变。
对于固定的末端骨骼和根骨骼位置,在解算时,中间骨骼存在无穷多个解。如图:
解算器会尝试找到“最佳”的解,但这样的解可能仍然不止一个,且可能并不是期望的。
因此,为了明确指定中间骨骼的方位,解算器还允许指定一个 极向目标 来确定骨骼链的弯曲方向。
| 输入 | 类型 | 含义 |
|---|---|---|
末端执行器目标 | 三维向量 | 末端执行器的目标位置。 |
极向目标 | 三维向量 | 极向目标的位置。 |
| 对象属性 | 含义 |
|---|---|
末端执行器结点 | 末端执行器结点的名称。 |
末端执行器目标 | 末端执行器的目标设置。 |
极向目标 | 极向目标设置。 |
目标设置
目标设置用于描述末端执行器目标或极向目标。选项如下:
| 对象属性 | 含义 |
|---|---|
类型 | 目标类型。当为 VALUE 时,表示以指定(三维向量)值的形式表示目标位置;当为 BONE 时,表示以另一骨骼的位置作为目标位置;当为 NONE 时,表示以当前位置作为目标位置,也即不对该目标进行解算。 |
目标骨骼 | 当目标类型为 BONE 时,目标骨骼的名称。 |
目标位置空间 | 当目标类型为 VALUE 时,目标位置的空间。 |